この記事ではMCreator2025.2の情報を執筆しています。
こんにちは、もえやです。3年ほど前からMCreatorの制作動画をYoutubeにアップしています。
今回は、モブについていく大きい鶏を作ります。
モブをモブにテイムすることはできなかったので、無理やり追いかけさせています。
モブを作成する
プラスから、モブを作成します。
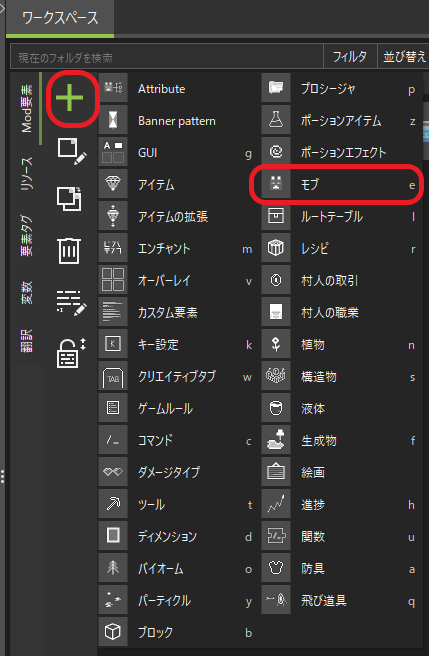
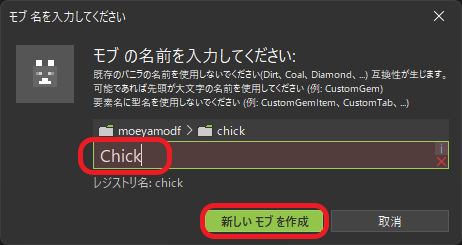
名前を入れて、新しいモブを作成、を押します。
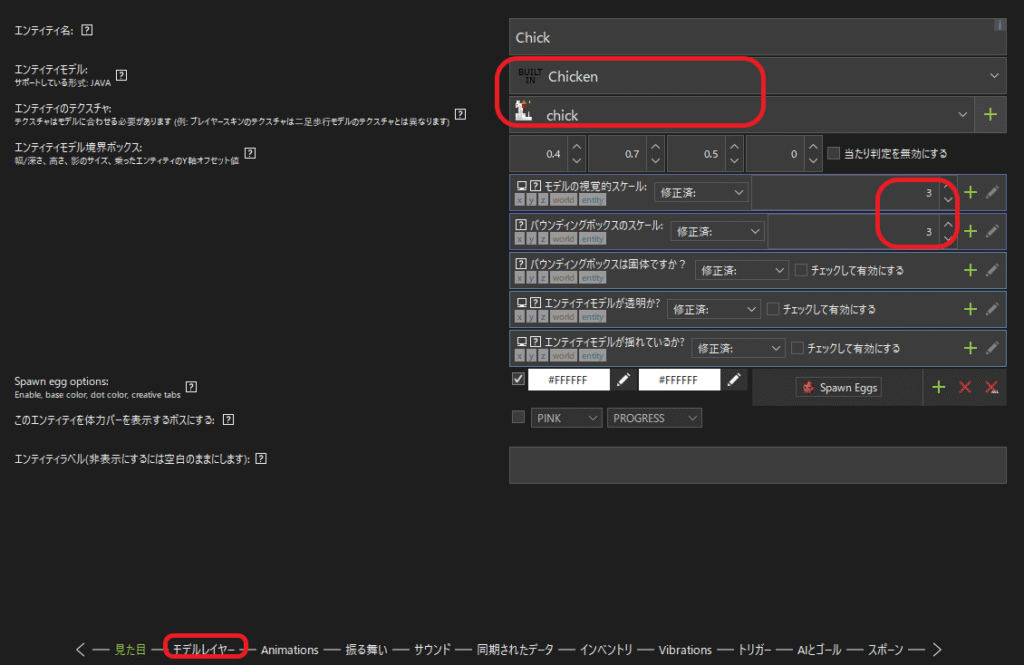
モデルとテクスチャを設定し、スケールを変更します。今回は大きくしました。
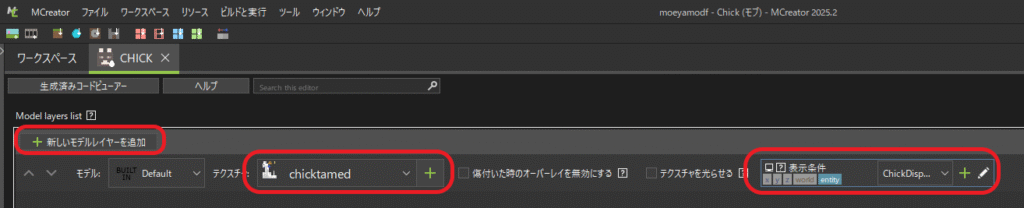
モデルレイヤーに移動します。
新しいモデルレイヤーを追加し、一部色違いのテクスチャを設定します。
表示条件のプラスから、表示条件を追加します。
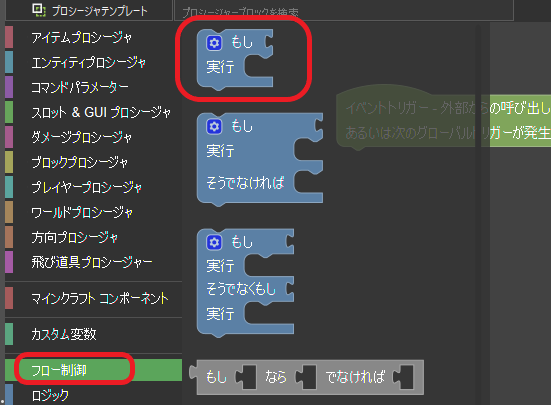
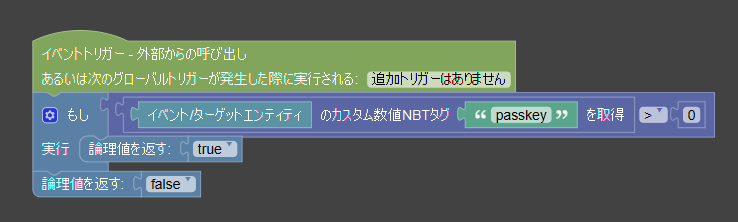
フロー制御から、もし~実行を持ってきます。
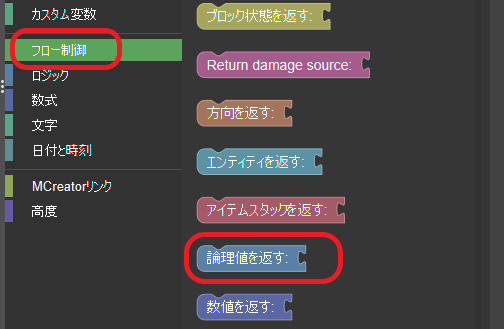
フロー制御から、論理値を返す、を持ってきます。
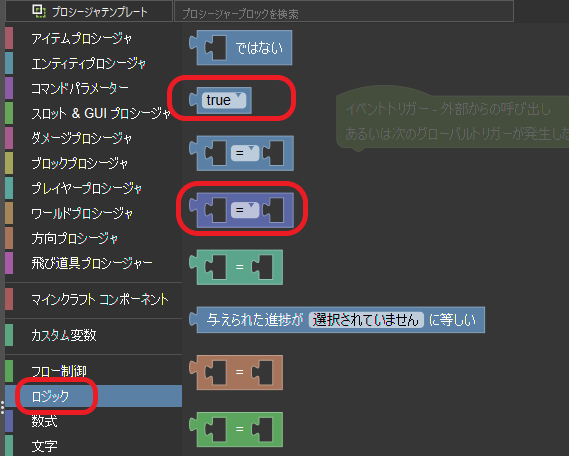
ロジックから、これらのプロシージャを持ってきます。
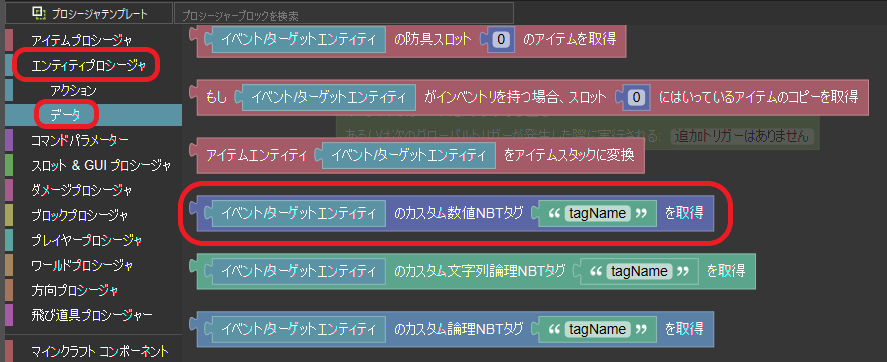
エンティティプロシージャのデータから、NBTタグを取得するプロシージャを持ってきます。
このように設定し、NBTタグの値が0より大きければtrueを返します。
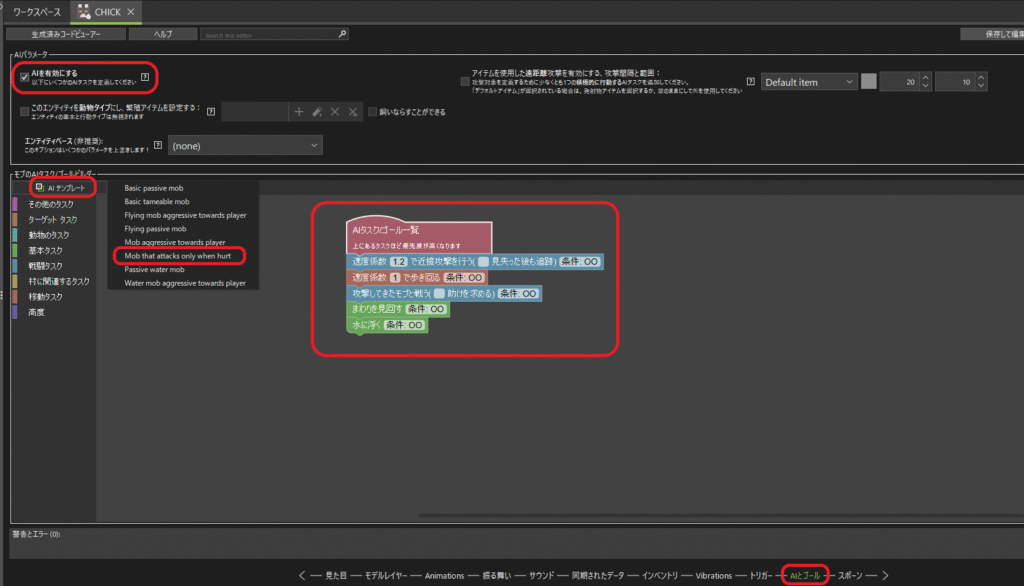
保存して、AIとゴールに移動します。
AIを有効にし、AIテンプレートから、攻撃された時だけ反撃するモブのテンプレートを持ってきて貼り付けます。
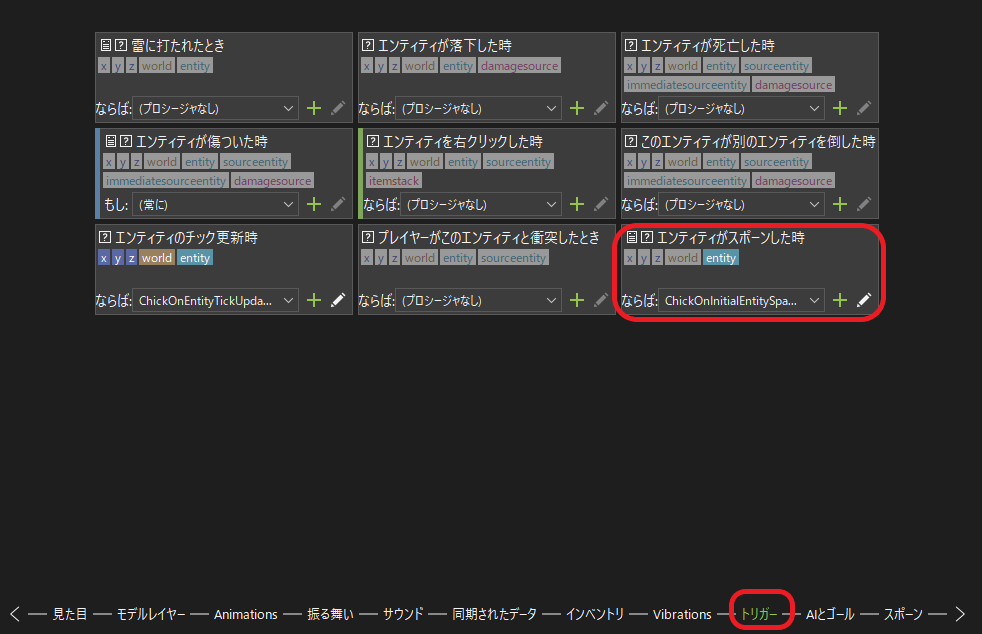
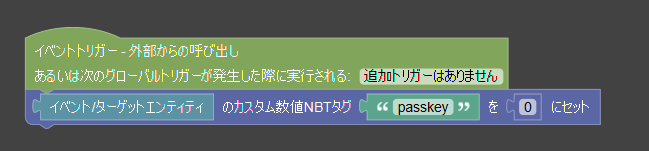
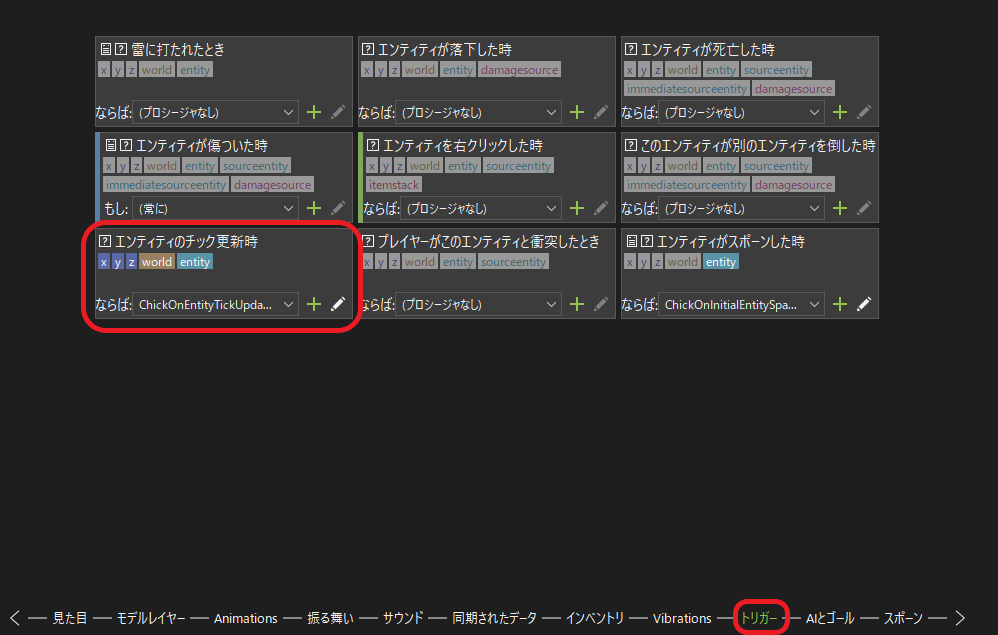
トリガーに移動し、エンティティがスポーンした時、のプラスから、プロシージャを作成します。
エンティティプロシージャのアクションから、NBTタグをセットするプロシージャを持ってきます。
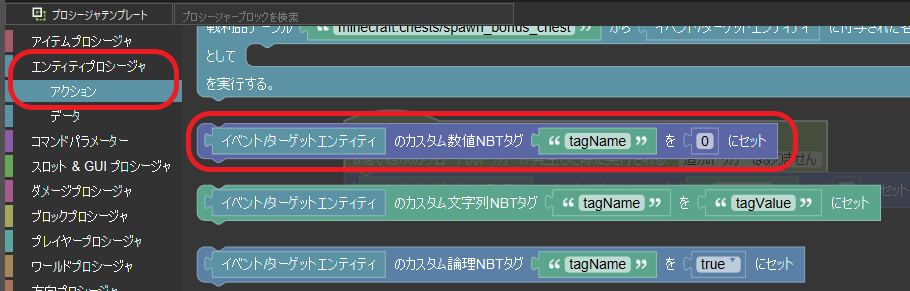
このように設定し、モブがスポーンしたときにNBTタグの値を0にし、保存します。
エンティティのチック更新時のプラスから、プロシージャを作成します。
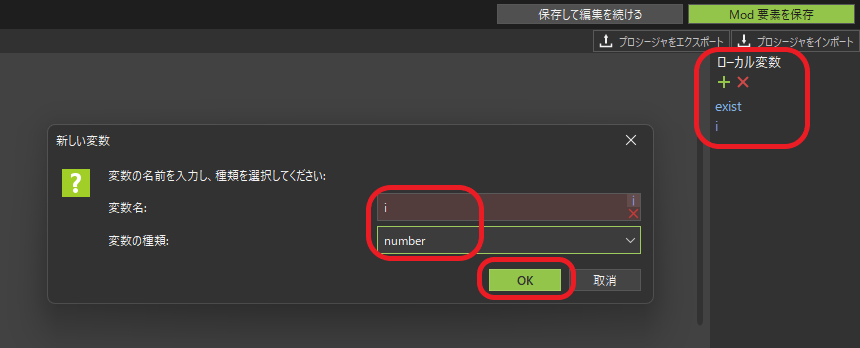
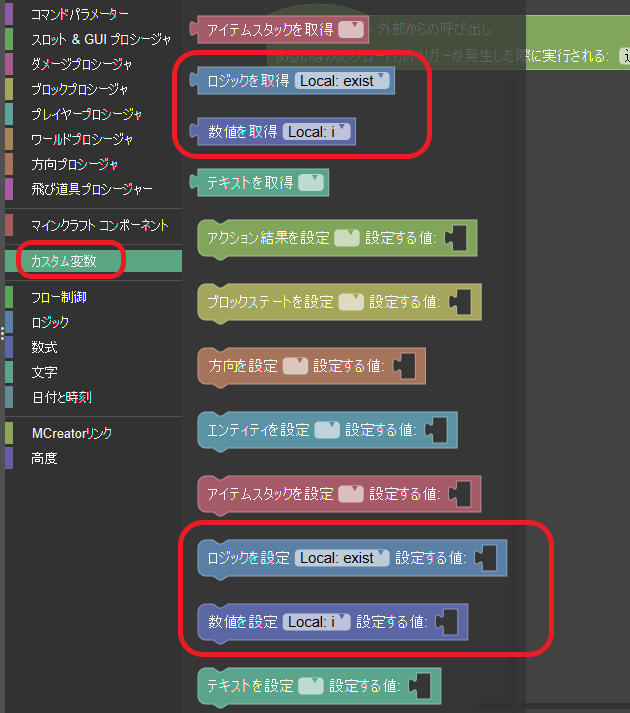
ローカル変数をlogicとnumber1つずつ作成します。
カスタム変数からこれらのプロシージャを持ってきます。
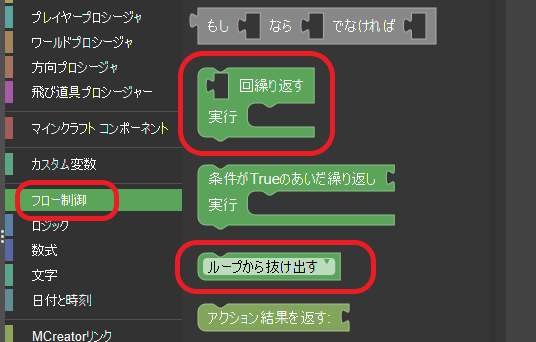
フロー制御から、これらのプロシージャを持ってきます。
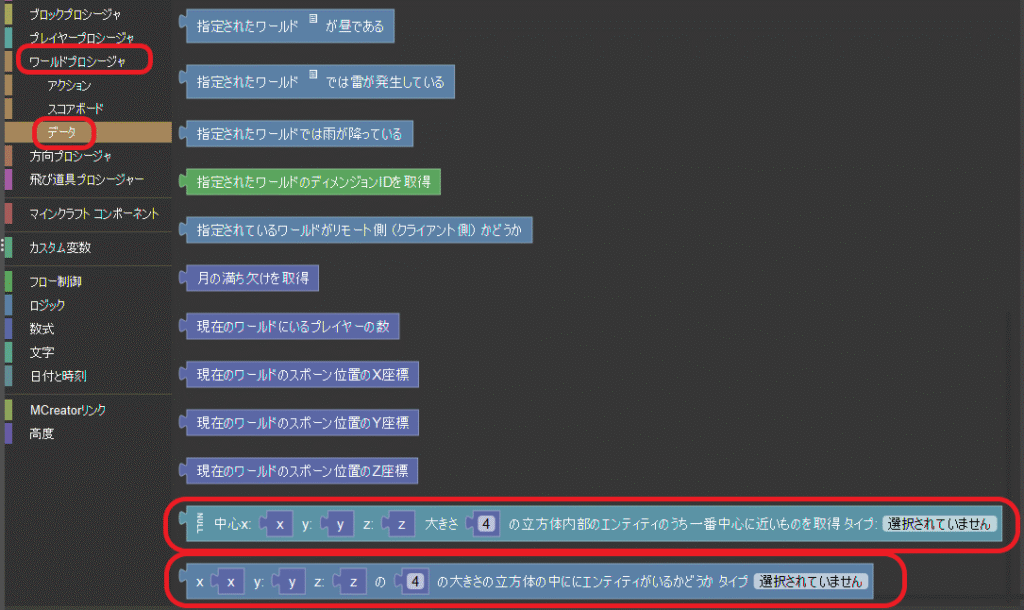
ワールドプロシージャのデータから、これらのプロシージャを持ってきます。
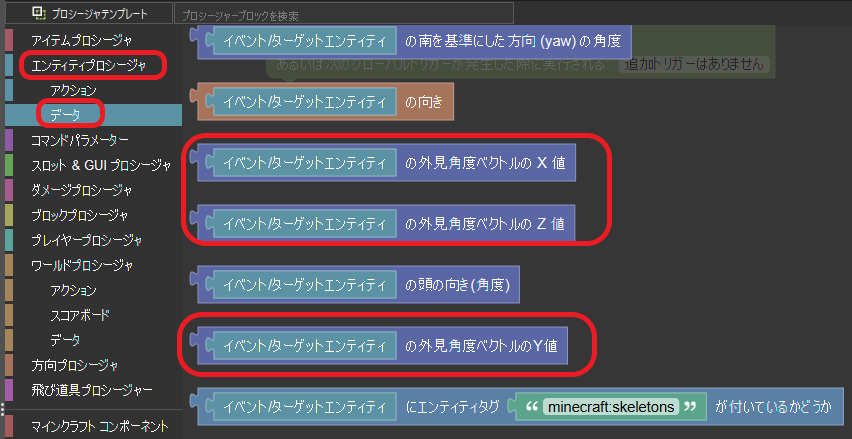
エンティティプロシージャのデータから、各方向の外見角度ベクトルの値を持ってきます。
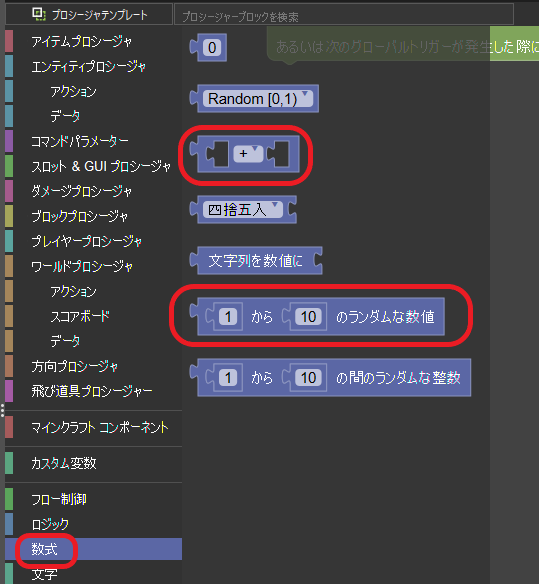
数式から、これらのプロシージャを持ってきます。
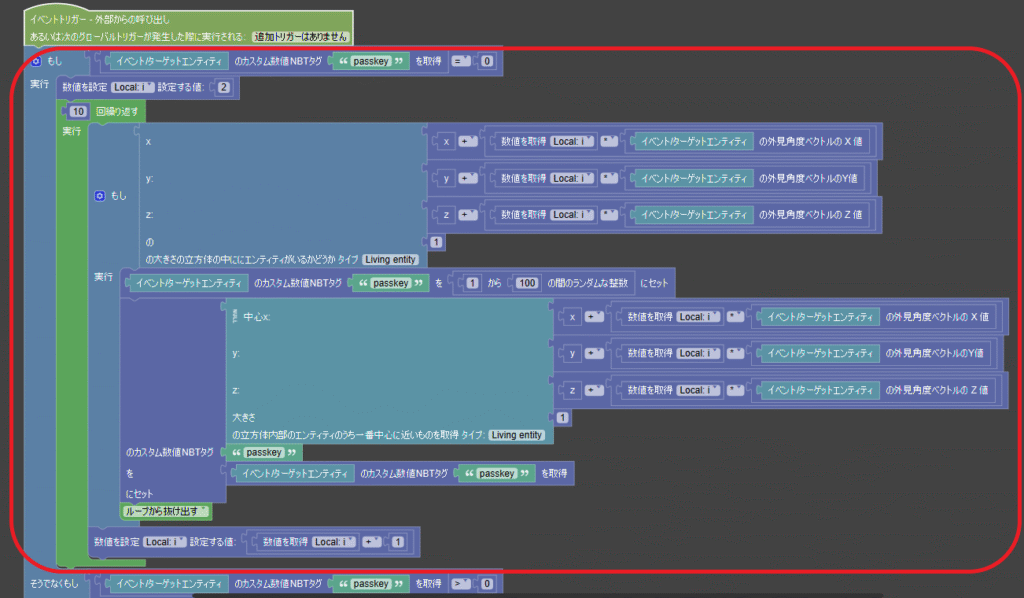
NBTタグの値が0の場合に、このように設定し、鶏の視線方向にいるモブとペアのタグが付くようにします。
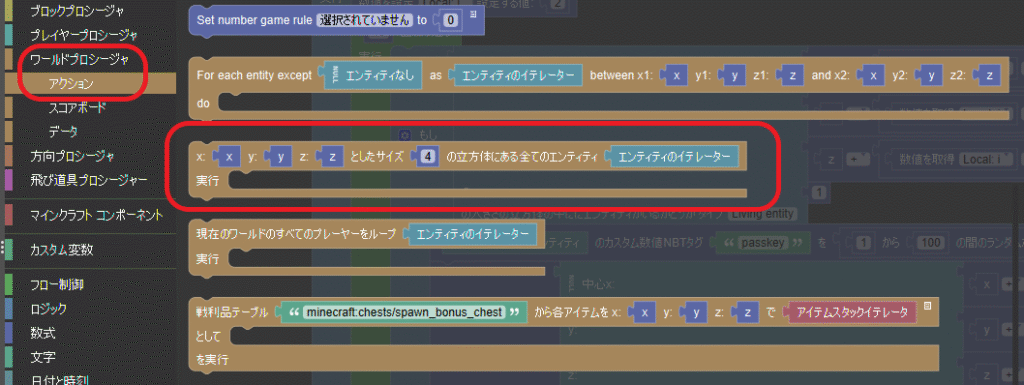
ワールドプロシージャのアクションから、範囲内のエンティティに実施する処理を持ってきます。
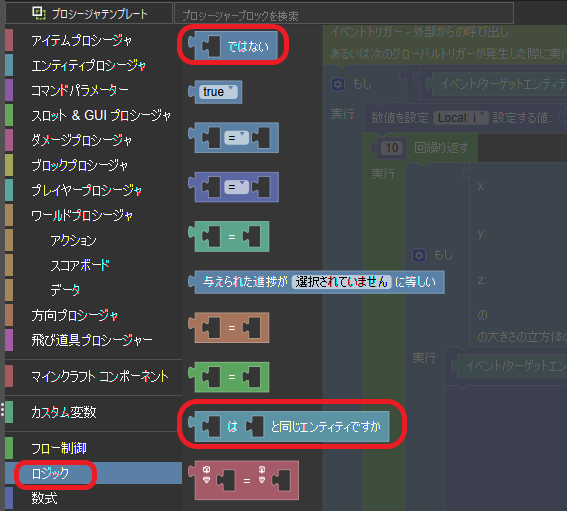
ロジックから、これらのプロシージャを持ってきます。
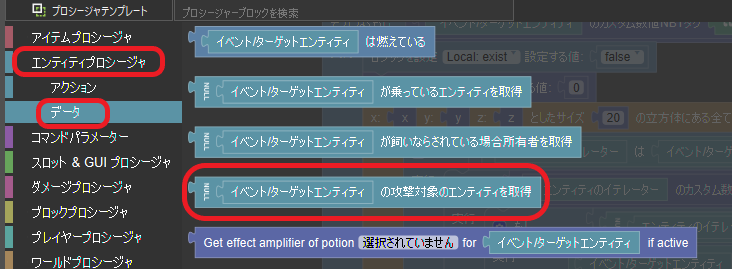
エンティティプロシージャのデータから、攻撃対象のエンティティを取得するプロシージャを持ってきます。
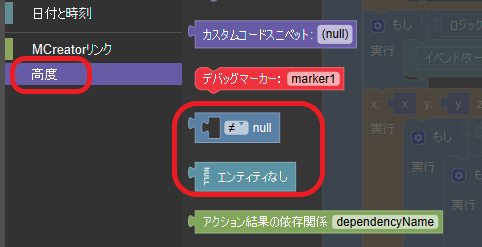
高度から、これらのプロシージャを持ってきます。
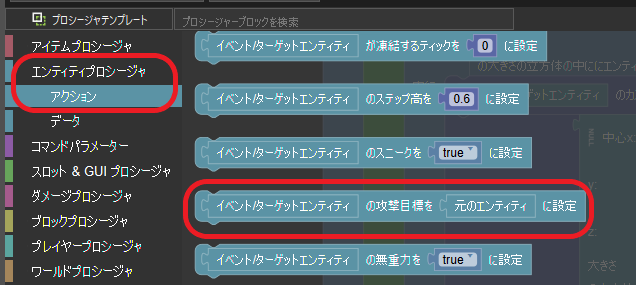
エンティティプロシージャのアクションから、攻撃目標を設定するプロシージャを持ってきます。
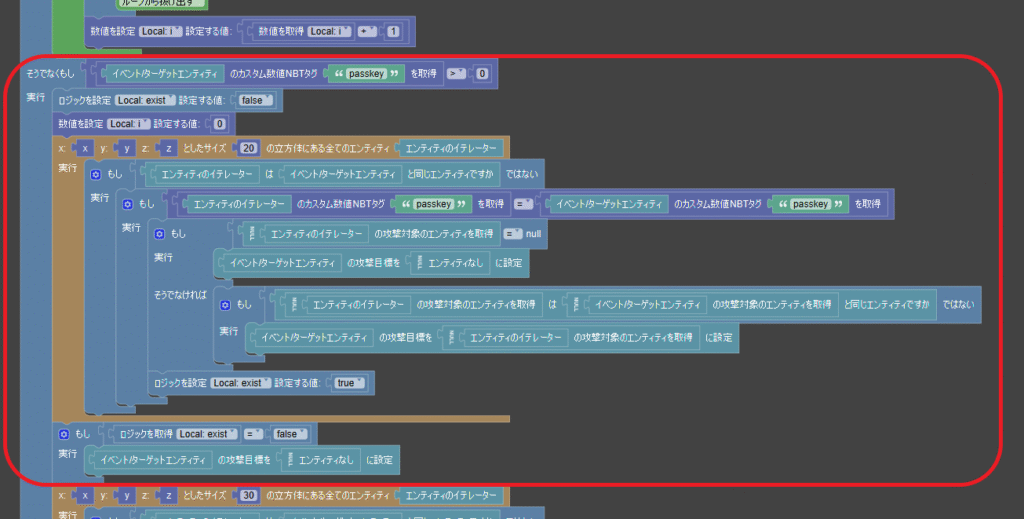
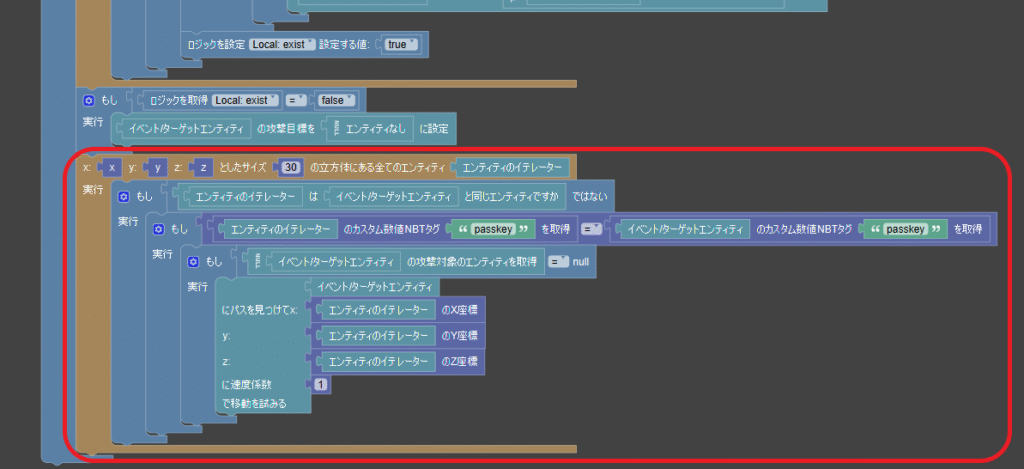
このように設定し、ペアのタグが付いている場合に、攻撃目標のモブが一致する様にします。
エンティティプロシージャのアクションから、こちらのプロシージャを持ってきます。
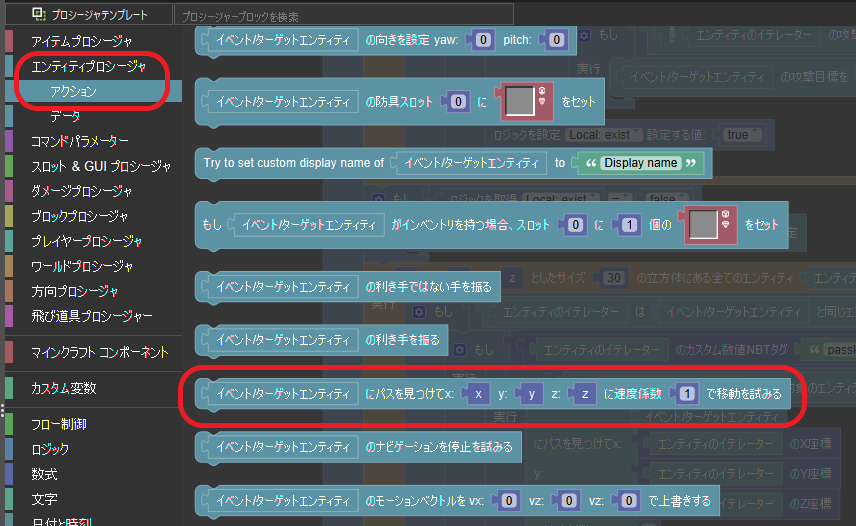
エンティティプロシージャのデータから、各方向の座標を取得するプロシージャを持ってきます。
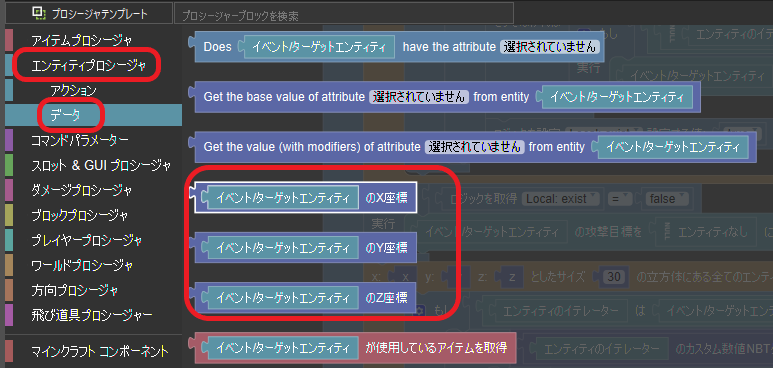
このように設定し、攻撃ターゲットが決まっていない場合に、鶏がペアのエンティティについていくように設定します。
保存して完成です。
鶏がハスクの後をついていくようになりました。